Media Summary: Accepted to IROS 2021. Abstract: In this paper we present a consistent and Accepted to IROS 2021. We present a consistent and ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.1 Authors: Schneider, Thomas; Dymczyk, Marcin Tomasz; Fehr, ...
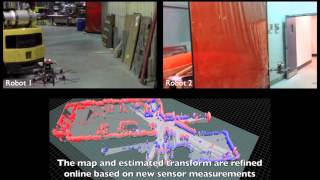
Distributed Visual Inertial Cooperative Localization Presentation - Detailed Analysis & Overview
Accepted to IROS 2021. Abstract: In this paper we present a consistent and Accepted to IROS 2021. We present a consistent and ICRA 2018 Spotlight Video Interactive Session Tue AM Pod U.1 Authors: Schneider, Thomas; Dymczyk, Marcin Tomasz; Fehr, ... Accepted to IROS 2022. System modeling and parameter identification of micro aerial vehicles (MAV) are crucial for robust ... This simulation shows the observability property of relative sensing. Distributed Visual 3-D Localization of A Human: A Passivity Approach
Lucas Teixeira, Ignacio Alzugaray and Margarita Chli, "Autonomous Aerial Inspection using Accepted to ICRA2021. Abstract: This paper studies the problem of multi-robot This paper studies the measurement scheduling problem for a group of N mobile robots moving on a flat surface that are ... Four vehicles: only one has access to GPS and the rest have the range and bearing information. This video shows the result of research in The 1st Israeli Smart Transportation Students Conference (ISTSC-1) was hosted by Bar-Ilan University on December, 3 2020.
Cooperative localization using particles intersection