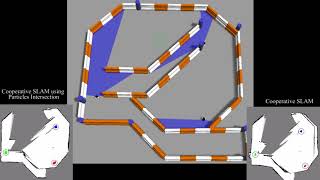
Media Summary: Cooperative localization using particles intersection This video shows the result of research in distributed information fusion and its application in robotics. The two robots in this video ... This work presented at ICRA 2015 introduces a framework for
Cooperative Localization Using Particles Intersection - Detailed Analysis & Overview
Cooperative localization using particles intersection This video shows the result of research in distributed information fusion and its application in robotics. The two robots in this video ... This work presented at ICRA 2015 introduces a framework for Smart Munitions: Cooperative Homing using Cooperative Localization This is the simulation result for w = 1.0 rad/s. Full paper can be found at ... We handle a scenario in which the goal point is located at (800800). The environmental disturbance direction is plotted
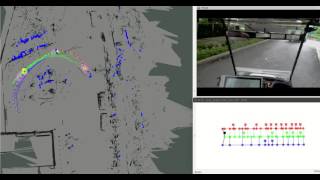
Target Defense with Cooperative Localization Multi-vehicle Cooperative Localization Using Pose Graph This paper studies the measurement scheduling problem for a group of N mobile robots moving on a flat surface that are ... This simulation shows the observability property of relative sensing. multi-vehicle cooperative localization using pose graph techniques and v2v communication Four vehicles: only one has access to GPS and the rest have the range and bearing information.
Discrete Time Observability For Cooperative Localization using automated synchronization Gia-Minh Hoang, Denis Benoit, Jerome Haerri, Dirk Slock, “On Communication Aspects of