Media Summary: Accepted to IROS 2021. We present a consistent and Accepted to IROS 2021. Abstract: In this paper we present a consistent and This work presented at ICRA 2015 introduces a framework for
Distributed Real Time Cooperative Localization And Mapping - Detailed Analysis & Overview
Accepted to IROS 2021. We present a consistent and Accepted to IROS 2021. Abstract: In this paper we present a consistent and This work presented at ICRA 2015 introduces a framework for Video complementing our conference paper in ICRA 2015. Full paper @ A method for localising a network of cameras withut using a centralised control unit. PFedKalmanNet-SA: Cooperative Localization in CAV via Joint Distributed Learning and Decision-Making
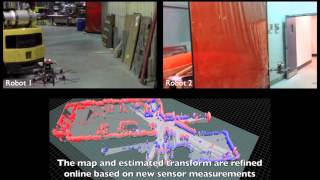
The 1st Israeli Smart Transportation Students Conference (ISTSC-1) was hosted by Bar-Ilan University on December, 3 2020. This paper studies the measurement scheduling problem for a group of N mobile robots moving on a flat surface that are ... A search-and-rescue scenario has been assembled in the Robotics Laboratory for the validation of the Presented at the 18th International Symposium on Mobile Ad Hoc Networking and Computing. This simulation shows the observability property of relative sensing.