Media Summary: Accepted to IROS 2021. We present a consistent and Accepted to IROS 2021. Abstract: In this paper we present a consistent and This work presented at ICRA 2015 introduces a framework for
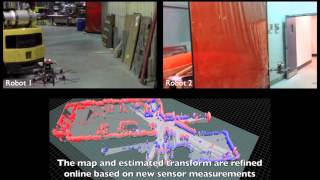
Distributed Visual Inertial Cooperative Localization Demonstration - Detailed Analysis & Overview
Accepted to IROS 2021. We present a consistent and Accepted to IROS 2021. Abstract: In this paper we present a consistent and This work presented at ICRA 2015 introduces a framework for We handle a scenario in which the goal point is located at (800800). The environmental disturbance direction is plotted with blue ... This simulation shows the observability property of relative sensing. Distributed Visual 3-D Localization of A Human: A Passivity Approach
The paper Scalable Outdoors Autonomous Drone Flight with Lucas Teixeira, Ignacio Alzugaray and Margarita Chli, "Autonomous Aerial Inspection using This is the simulation result for w = 1.0 rad/s. Full paper can be found at ... Accepted to IROS 2022. System modeling and parameter identification of micro aerial vehicles (MAV) are crucial for robust ...