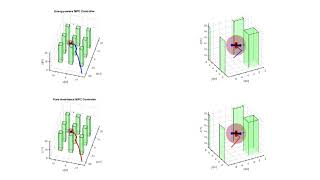
Media Summary: Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic My final experiment for bachelor's thesis at Czech Technical University, Faculty of Electrical Engineering. My task was to create a ... The video shows a quadrotor avoiding virtual obstacles
Uav Obstacle Avoidance Using Model Predictive Control - Detailed Analysis & Overview
Authors: M. A. Santos, A. Ferramosca, G. V. Raffo. This work presents an Economic My final experiment for bachelor's thesis at Czech Technical University, Faculty of Electrical Engineering. My task was to create a ... The video shows a quadrotor avoiding virtual obstacles This work proposes single-layer nonlinear At HAN Automotive Research, the 1:3 scaled tractor-semitrailer test vehicle is instrumented IEEE LARS 2021 Abstract: This work proposes a single-layer nonlinear finite-horizon optimal
ICUAS 2021 Abstract: This work proposes a single-layer finite-horizon optimal This work is the implementation of the paper, Two-level Model Predictive Control Obstacle Avoidance













![Model predictive control for obstacle avoidance for autonomous ground vehicles [1/2]](https://i.ytimg.com/vi/RcY41FFBqOc/mqdefault.jpg)


