Media Summary: I decided to show you a little preview of my Full project report and documentation is available at Implemented GPU-based A* Theta* for geometric path planning. ORCA for path following with
Swarmai Collision Avoidance Pathfinding System How It Works - Detailed Analysis & Overview
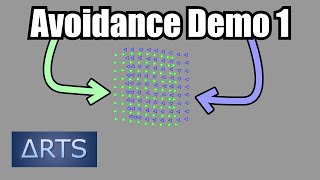
I decided to show you a little preview of my Full project report and documentation is available at Implemented GPU-based A* Theta* for geometric path planning. ORCA for path following with 2019 IEEE Conference on Decision and Control (CDC) supplementary material of the paper titled "Integrated Path Following and ... Two groups of units moving in opposite directions. Added 2d soft shadows on generic polygons and some obstacles. The swarm units die when
This clip demonstrates NPCs adjusting their paths to avoid Ever wondered how robots navigate complex environments without bumping into obstacles? This video breaks down the ... There where do I go next and based on the terrain data and the static obstacles the the MY095 - Implementing Optimal Reciprocal Collision Avoidance (ORCA) for robotic navigation 101 TIE FIGHTERS, 2 CAPITAL SHIPS 400 FPS!!! I am working on a prototype that will be used for a future space action combat ... Here an NMPC has been designed to avoid a dynamic obstacle. CasADi is the best tool for this simulation. I will go through the ...
Unity Practice - AI Behavior (Seek, A* Path Finding, Obstacle Avoidance)