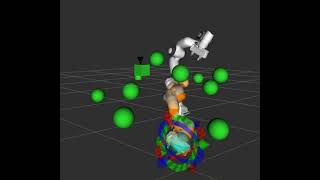
Media Summary: Trajectory generated by the RRT* algorithm in a planning task using both arms. The goal is to reach the pre-grasp configuration ... Mobile manipulation with the TIAGo robot Final Master Thesis Miller Stiven Espinosa Muñoz Xavier Garcia Peroy IOC - UPC ... Motion Planning-RRT implementation, unsmoothened on PR2 in OpenRAVE
Rrtconnect Pr2 - Detailed Analysis & Overview
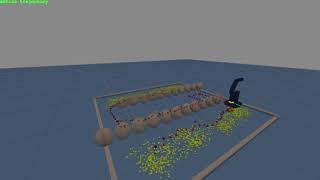
Trajectory generated by the RRT* algorithm in a planning task using both arms. The goal is to reach the pre-grasp configuration ... Mobile manipulation with the TIAGo robot Final Master Thesis Miller Stiven Espinosa Muñoz Xavier Garcia Peroy IOC - UPC ... Motion Planning-RRT implementation, unsmoothened on PR2 in OpenRAVE Implementation of RRT Algorithm for collision free motion planning of Implementation of the extend variant of the mr_2 robot navigating obstacles ME567 Fall 2017 asgn6 parthc.edu KinEval Code Stencil: ...
HW 2 Given Start and Goal Configurations. A Case Study of Trajectory Transfer Through Non-Rigid Registration for a Simplified Suturing Scenario - John Schulman, Ankush ...