Media Summary: Presentation by Jay Patrikar and Brady Moon, part of the AirLab Summer School 2020. Sessions list, overviews, and links to the ... [GSOC2018] Navigation of Ardrone with OMPL(1) or_ompl provides OpenRAVE bindings for the
Ompl Rrtconnect Demo - Detailed Analysis & Overview
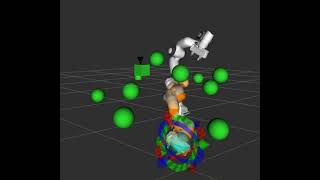
Presentation by Jay Patrikar and Brady Moon, part of the AirLab Summer School 2020. Sessions list, overviews, and links to the ... [GSOC2018] Navigation of Ardrone with OMPL(1) or_ompl provides OpenRAVE bindings for the Planning on a sparse roadmap See paper Sparse "Roadmap Spanners" ... Trying out re-planning in moveit with the Tabletop Clearing with Drake Designer EXOTica OMPL RRTConnect on Kuka LWR
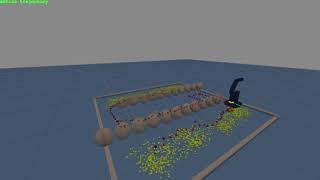
The main point of this video is to experiment with using rviz_tools_py to add text and visualize robot poses, without having to edit ... OMPL: the ReedsSheppStateSpace state space, the RRTstar planner a gazebo world for ArDrone ompl navigation This video shows a motion plan for a car-like vehicle simulated with Open Dynamics Engine. The goal is for the yellow car to ... В нашей школе открылся проект mr_2 robot navigating obstacles ME567 Fall 2017 asgn6 parthc.edu KinEval Code Stencil: ...


![[GSOC2018] Navigation of Ardrone with OMPL(1)](https://i.ytimg.com/vi/ZQ0N7v7wdHg/mqdefault.jpg)