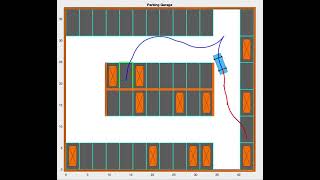
Media Summary: This video shows how to generate the shortest length path between given start and ending positions for a car that can go forwards ... This video shows how to generate the shortest length path for a car that can only move forwards between given start and ending ... ... is here: Path planning for a car robot with RRT* and
Reeds Shepp Explanation - Detailed Analysis & Overview
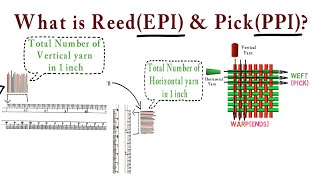
This video shows how to generate the shortest length path between given start and ending positions for a car that can go forwards ... This video shows how to generate the shortest length path for a car that can only move forwards between given start and ending ... ... is here: Path planning for a car robot with RRT* and This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Here the search steps have been slowed down, to visualise the grid graph expansion as well as the Vobot Application Downloading Link: This video is all about What is Reed & Pick in ...
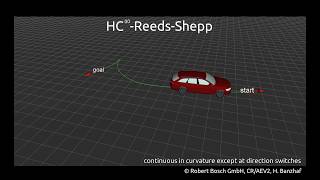
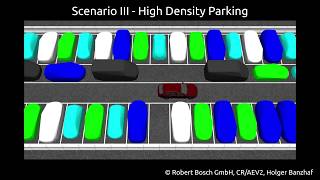
This video shows a comparison of the three most important steering functions for car-like robots: This video shows Hybrid Curvature Rate (HCR) and Continuous Curvature Rate (CCR) Steer: Two novel steering functions for ... A Dubin's car is a special car-like robot that can only move forward in a 2d plane. Therefore, solving for its shortest paths is ...




![[PythonRobotics] RRT* with reeds-sheep path](https://i.ytimg.com/vi/BGS-cfrhAos/mqdefault.jpg)