Media Summary: This video shows how to generate the shortest length A hybrid A* algorithm that I am developing for my master's thesis at KTH Royal Institute of Technology. The Authors: Faigl, J. - faiglj.cvut.cz Váňa, P. - vanapet1.cvut.cz Drchal, J. - drchal.cvut.cz Paper abstract: Multi-goal ...
Coding A Dubins Car Optimal Path Planner - Detailed Analysis & Overview
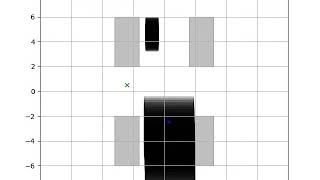
This video shows how to generate the shortest length A hybrid A* algorithm that I am developing for my master's thesis at KTH Royal Institute of Technology. The Authors: Faigl, J. - faiglj.cvut.cz Váňa, P. - vanapet1.cvut.cz Drchal, J. - drchal.cvut.cz Paper abstract: Multi-goal ... See the other videos in this series: This video ... How do you drive/fly forward from one position to another with a limited turning radius and end up facing the correct direction? So here we have a demonstration of how the
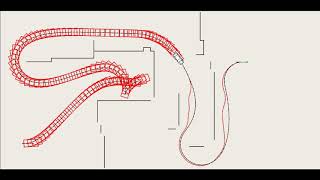
RRT-Dubins Planner with Collision Detection for Dynamic Obstacles Implement rapidly-exploring random tree (RRT) Authors: Brady Moon, Sagar Sachdev, Junbin Yuan, and Sebastian Scherer Website and Demo:





![[PythonRobotics] Dubins path planner sample code](https://i.ytimg.com/vi/R3T1LwYRS8c/mqdefault.jpg)





![[PythonRobotics] RRT* with dubins path](https://i.ytimg.com/vi/ZH6NHrALBAg/mqdefault.jpg)