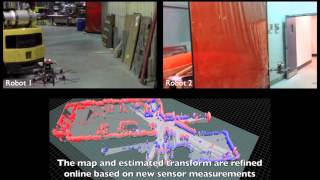
Media Summary: ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.7 Authors: Chang, Tsang-Kai; Mehta, Ankur Title: Optimal ... This paper studies the measurement scheduling problem for a group of N mobile robots moving on a flat surface that are ... The video includes the experiment and shows a team of mobile robots moving in a circular trajectory where the objective is to ...
Range Only Cooperative Localization - Detailed Analysis & Overview
ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.7 Authors: Chang, Tsang-Kai; Mehta, Ankur Title: Optimal ... This paper studies the measurement scheduling problem for a group of N mobile robots moving on a flat surface that are ... The video includes the experiment and shows a team of mobile robots moving in a circular trajectory where the objective is to ... UAVs localize themselves using two landmarks. This simulation shows the observability property of relative sensing. For more information, please refer to: X. Shen, S. Pendleton, and M. H. Ang Jr., "Scalable
Smart Munitions: Cooperative Homing using Cooperative Localization Reliable Cooperative Localization for Vehicles sharing GNSS pseudo-ranges Corrections The video shows that a group of mobile robots are moving in a circular trajectory where the objective is to perform the This video shows the result of research in distributed information fusion and its application in robotics. The two robots in this video ... This is the simulation result for w = 1.0 rad/s. Full paper can be found at ...