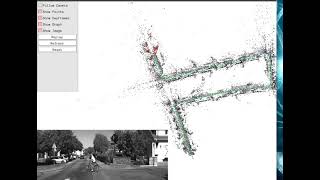
Media Summary: This real-time Visual SLAM application is a deep code modification of the brilliant work by Klein and Murray , " S-PTAM is a Stereo SLAM system able to compute the camera trajectory For my 2020 Quest Project, I used the power of stereoscopic cameras to build depth
Parallel Tracking And Mapping Exclusively Using Opencv - Detailed Analysis & Overview
This real-time Visual SLAM application is a deep code modification of the brilliant work by Klein and Murray , " S-PTAM is a Stereo SLAM system able to compute the camera trajectory For my 2020 Quest Project, I used the power of stereoscopic cameras to build depth Check out the PRO version of the bootcamp: Language + ... Get a look at our course on data science and AI here: This project is based on PTAM original point features source code. According to the article "Improving the agility of ...
AI Vision Courses + Community → Blog ...