Media Summary: Video companion (1/2) of the paper: "Design, Control, and Experiments of a Low-Cost Video companion (2/2) of the paper: "Design, Control, and Experiments of a Low-Cost Reconfigurable Cable Driven Parallel Robot Test 1
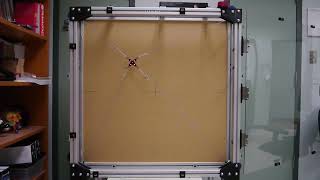
Open Source Planar Cable Driven Parallel Robot Interpolated Trajectory - Detailed Analysis & Overview
Video companion (1/2) of the paper: "Design, Control, and Experiments of a Low-Cost Video companion (2/2) of the paper: "Design, Control, and Experiments of a Low-Cost Reconfigurable Cable Driven Parallel Robot Test 1 Time-optimal trajectory scaling of a laboratory-developed cable-driven parallel robot This video serves as Multimedia extension for the following Article: Rushton, M., and Khajepour, A. (December 23, 2020). We have studied a generic methodology for the computation of the end-effector natural oscillation frequencies in an ...
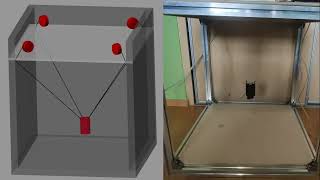
Discover the future of automation with our groundbreaking Speeds for J2 and J3 are around 25 RPM, J4 and J5 are around 50 RPM! Want to build your own? Follow the instructions on ... Rushton, Mitchell, and Amir Khajepour. "An Atlas-Based Approach to Design of a Cable-Driven parallel robot - Model comparison See also: Yusuke Sugahara, Guangcan Chen, Nanato Atsumi, Daisuke Matsuura, Yukio Takeda, Ryo Mizutani and Ryuta ... 5th-semester Machine and production students.