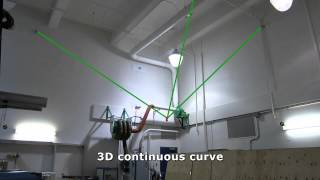
Media Summary: In this video you can see our third prototype: A redundant, Using launch motions to reach a target can enlarge the workspace of This is a tensegrity flexible manipulator that operates using
Suspended Cable Driven Robot Force Mode - Detailed Analysis & Overview
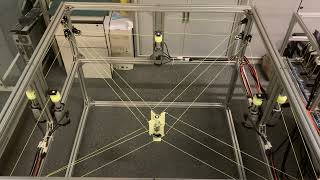
In this video you can see our third prototype: A redundant, Using launch motions to reach a target can enlarge the workspace of This is a tensegrity flexible manipulator that operates using ICRA 2018 Spotlight Video Interactive Session Thu PM Pod A.8 Authors: Seita, Daniel; Krishnan, Sanjay; Fox, Roy; McKinley, ... 7-DOF Cable-Driven Parallel Robot with a Reconfigurable Cable End-Effector Reconfigurable Cable Driven Parallel Robot Test 1
SEGESTA Universität Duisburg-Essen Lehrstuhl für Mechatronik. This is an experimental printer being developed at the University of Central Lancashire. The goal is to develop a simple low-cost ... This video is intended to demonstrate a prototype Time-optimal trajectory scaling of a laboratory-developed cable-driven parallel robot Cable-Driven Actuation for Highly Dynamic Robotic Systems This video presents a planar parallel threedegree-of-freedom
A video showing the relationship between the available wrench set of a flying