Media Summary: This lecture provides an overview of model predictive control (MPC), which is one of the most powerful and general control ... Quadrotor flight is an extremely challenging problem due to the limited control authority encountered at the limit of handling. This video shows the data-driven improvement of an autonomous
Mpcc Race Simulation - Detailed Analysis & Overview
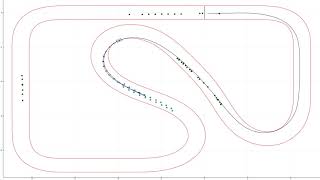
This lecture provides an overview of model predictive control (MPC), which is one of the most powerful and general control ... Quadrotor flight is an extremely challenging problem due to the limited control authority encountered at the limit of handling. This video shows the data-driven improvement of an autonomous The MPC controller calculates the steering angle and throttle at each time stamp so that the cost of the car position in the very ... This video shows the obstacle avoidance of the model predictive contouring control for 1:43 scale dnano RC cars. Compared to ... Cyan dots: sampled safe set Green dots: data used to do system identification (local least mean square) Black prediction: ...
Model Predictive Path Integral Control For Car Driving With Dynamic Cost Map This video shows a model predictive contouring control approach to autonomous We tackle the problem of flying time-optimal trajectories through multiple waypoints with quadrotors. State-of-the-art solutions split ... Ugo Rosolia is a postdoctoral scholar at Caltech working with Prof. Aaron Ames and Prof. Yisong Yue. He obtained his PhD from ... Presented paper can be downloaded here: ... This video shows the newly implemented Nonlinear MPC for autonomous
Contributed Papers 1-6 [Paper ] Chanyoung Jung, Seungwook Lee, Hyunki Seong, Andrea Finazzi and David Hyunchul Shim, ...













![[ICRA21 Autonomous Racing] - Ugo Rosolia (Caltech) - Learning to race using a predictive control](https://i.ytimg.com/vi/hC9FbAerr00/mqdefault.jpg)



![[ICRA21 Autonomous Racing] - Contributed Papers 1-6](https://i.ytimg.com/vi/LPZmX7XaAo4/mqdefault.jpg)
