Media Summary: Presented paper can be downloaded here: ... This is the accompanying video of the paper titled "L4acados - Using a simple car example, this video provides insight into an
Learning Based Model Predictive Control For Autonomous Racing - Detailed Analysis & Overview
Presented paper can be downloaded here: ... This is the accompanying video of the paper titled "L4acados - Using a simple car example, this video provides insight into an Link to addendum: Results on the AutoRally platform when varying the number of sampled rollouts ... Ugo Rosolia is a postdoctoral scholar at Caltech working with Prof. Aaron Ames and Prof. Yisong Yue. He obtained his PhD from ... Here an NMPC has been designed to avoid a dynamic obstacle. CasADi is the best tool for this simulation. I will go through the ...
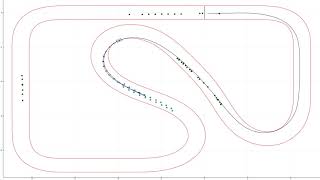
Cyan dots: sampled safe set Green dots: data used to do system identification (local least mean square) Black Credit to Shuqi Xu, Ugo Rosolia and Jon Gonzales @ Berkeley MPC Lab Link to previous video: Additional results at a higher target speed of 11 m/s (compared to 9 m/s for ... This video shows the data-driven improvement of an





![[ICRA21 Autonomous Racing] - Ugo Rosolia (Caltech) - Learning to race using a predictive control](https://i.ytimg.com/vi/hC9FbAerr00/mqdefault.jpg)