Media Summary: Video for the IROS 2023 submission. The video presents the experimental results of the paper " Full paper and additional information available at Publication: " Assignment 6 for the Computational Models of Motion Course at ETH Zurich 00:00 Direct Shooting -
Continuous Implicit Sdf Based Any Shape Robot Trajectory Optimization - Detailed Analysis & Overview
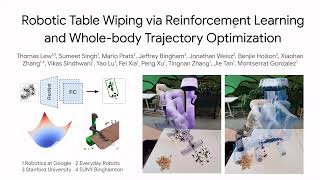
Video for the IROS 2023 submission. The video presents the experimental results of the paper " Full paper and additional information available at Publication: " Assignment 6 for the Computational Models of Motion Course at ETH Zurich 00:00 Direct Shooting - Our approach combines the strengths of reinforcement learning (RL) - planning in high-dimensional observation spaces with ... Jenkins! You have too much coffee in your mug!” The general expression to say there is nothing worse than spilling coffee/hot ... Christopher Edwin Mower, Joao Moura, Nazanin Zamani Behabadi, Sethu Vijayakumar, Tom Vercauteren and Christos Bergeles, ...
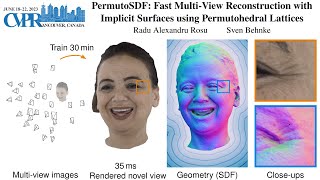
This is the companion video of the paper "Direct Collocation Methods for LeRobot Research Presentation Presented by Cheng Chi in April 2024 This week: Diffusion Policy ... Neural radiance-density field methods have become increasingly popular for the task of novel-view rendering. Their recent ... an introduction to signed distance functions ➟ ➟ Note: This was the last in-person lecture in 2020 before COVID-19 distrupted our semester. Please watch the Spring 2019 ... Okay and you can imagine now that writing a optimization problem if i wanted to do
This video shows a lap time simulation of a Formula One car performing a qualifying lap at the Circuit de Barcelona-Catalunya.