Media Summary: Final Project Video for MIT 6.832: Underactuated Robotics. In this project, we apply March 3, 2026 Instructor: Dr. Christian Hubicki Applied Optimal Control EML 4930/5930-0001. Publication by Tim Seyde, Jan Carius, Ruben Grandia, Farbod Farshidian, Marco Hutter Robotic
Collocation Methods For Trajectory Optimization In Constrained Systems - Detailed Analysis & Overview
Final Project Video for MIT 6.832: Underactuated Robotics. In this project, we apply March 3, 2026 Instructor: Dr. Christian Hubicki Applied Optimal Control EML 4930/5930-0001. Publication by Tim Seyde, Jan Carius, Ruben Grandia, Farbod Farshidian, Marco Hutter Robotic Lecture 12 for Optimal Control and Reinforcement Learning 2022 by Prof. Zac Manchester. Topics: - Free and minimum-time ... Full paper and additional information available at Publication: " This video shows how to formulate and program a
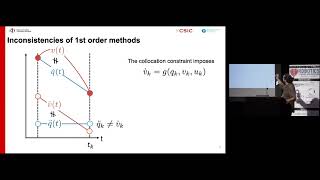
Talk by Siro Moreno-Martin at RSS 2022, New York, presenting the paper: "