Media Summary: In this paper we propose a method to improve the accuracy of Contact-Implicit Trajectory Optimization using an Analytically Solvable Contact Model Full paper and additional information available at Publication: "
Contact Implicit Trajectory Optimization Using Orthogonal Collocation - Detailed Analysis & Overview
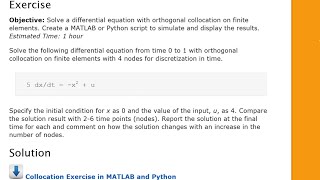
In this paper we propose a method to improve the accuracy of Contact-Implicit Trajectory Optimization using an Analytically Solvable Contact Model Full paper and additional information available at Publication: " Paper: Code and more: Abstract - Robots must make and break Subject: Chemical Engineering Courses: Advanced numerical analysis. Discretization of a continuous time representation allow large-scale nonlinear programming (NLP) solvers to find solutions at ...
Planning locomotion strategies for legged microrobots is challenging due to their complex morphology, high frequency passive ... Course Instructor: Pieter Abbeel Guest Lecturer: Igor Mordatch Course Website: ... Simulation vs. experimental results are demonstrated for three non-prehensile manipulation tasks of increasing complexity: (1) ... March 3, 2026 Instructor: Dr. Christian Hubicki Applied Optimal Control EML 4930/5930-0001.