Media Summary: Collaborative Multi Robot Incremental SLAM Collaborative Multi Robot Incremental SLAM with 2 MAVs Abstract: we present an innovative approach to
Collaborative Multi Robot Incremental Slam - Detailed Analysis & Overview
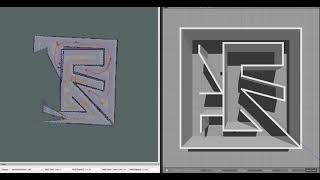
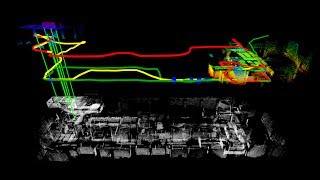
Collaborative Multi Robot Incremental SLAM Collaborative Multi Robot Incremental SLAM with 2 MAVs Abstract: we present an innovative approach to This paper revisits Kimera-Multi, a distributed A novel framework is proposed for distributed, This is a video accompanying the paper decentralized active information acquisition Theory and application to
Accompanying video for our IROS17 publication titled "An Online The 1st Israeli Smart Transportation Students Conference (ISTSC-1) was hosted by Bar-Ilan University on December, 3 2020. Video supplement to our 2015 IEEE International Conference on Synchronization and repeatability are essential for industrial 220421 ROS2 Multi-Robot SLAM Simulation with Known Initial Poses An application of multi-robot slam in indoor environments
This video showcases our thesis work during the spring of 2023. Four Turtlebot3


![[WIM Robotics] Collaborative Multi-Robot Operation with Yaskawa Robots](https://i.ytimg.com/vi/15VE9GKNwF4/mqdefault.jpg)