Media Summary: This video is the internal view of the camera used to servo a Franka Robotics Panda robot in an eye-to-hand configuration using ... This video shows the behavior of a 2D half visual servoing (2D 1/2) scheme. In the This video shows an example of coupling visual servoing and joint-limits avoidance with
Visp Image Simulator - Detailed Analysis & Overview
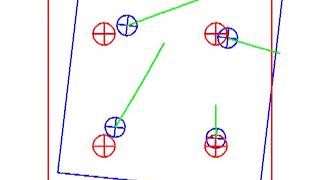
This video is the internal view of the camera used to servo a Franka Robotics Panda robot in an eye-to-hand configuration using ... This video shows the behavior of a 2D half visual servoing (2D 1/2) scheme. In the This video shows an example of coupling visual servoing and joint-limits avoidance with This video shows the trajectory of 4 points in the This video shows the trajectory of the camera from an external point of view during an This video shows the blob tracking of 4 points and their trajectory in the
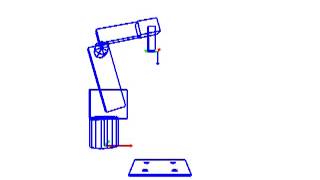
This example shows how it is possible with This video shows an augmented reality application based on This video shows an example of pose computation thanks to the vpPose class implemented in Behavior comparison between the real ADEPT Viper s850 robot and the simulated one.