Media Summary: Variable-resolution map building and real-time path planning This video shows the animated running process of the most common See the other videos in this series: This video ...
Variable Resolution Map Building And Real Time Path Planning - Detailed Analysis & Overview
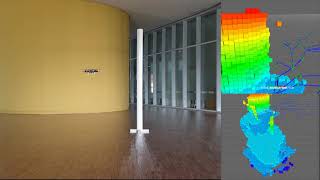
Variable-resolution map building and real-time path planning This video shows the animated running process of the most common See the other videos in this series: This video ... 位置と速度の地図を用いた軌道計画①. Video of the presentation at IROS 2022 of the paper "T-PRM: Temporal Probabilistic Roadmap for Receding Horizon-based RRT* Indoor Navigation Autonomous Flight Test Octomap(Realsens D435) + Offboard Control.
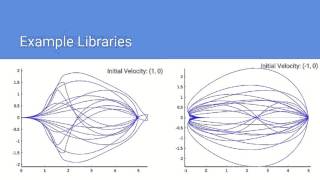
Need to get to your goal quickly? Ensure you plan the right Modern virtual environments can contain a variety of characters and traversable regions. Each character may have different ... The implementation is done in C++ using the OpenFrameworks Library. The implementation is located here ... ROTA project is held by the University of Aveiro and IEETA. Its main concern is to University of Waterloo - ME 597 - Lab 2 - Belief Map and Path Planning This work was carried out by Bradley Kohler, Ya-Jun Pan and Robert Bauer at the Advanced Control and Mechatronics Lab, ...
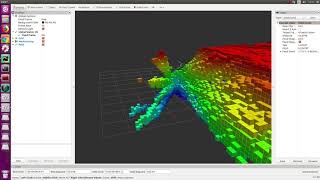
This work presents a new strategy for autonomous graph-based exploration Consider autonomous obstacle avoidance problem while minimizing the traveled distance in unknown environment. Only range ...