Media Summary: This talk aims to invite you to the forefront of MAPF research directly This is a re-recording of my invited talk at EurMAPF-25, ... RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable
Upgrading Multi Agent Pathfinding For The Real World - Detailed Analysis & Overview
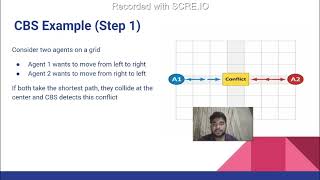
This talk aims to invite you to the forefront of MAPF research directly This is a re-recording of my invited talk at EurMAPF-25, ... RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable The video that describes my research about the Conflict-Based Search (CBS) and Heuristics for Theta* for geometric path planning. ORCA for path following with collision avoidance. Ad-hoc deadlock detection mechanism.
Multi-Agent Path Finding for Robots in Large Warehouse Video by Natalie R Abreu (University of Southern California) AAAI-22 Undergraduate Consortium Efficient Deep Learning for Abhay Chhagan Karade Vaibhav Nandkumar Kadam Akash Akshok Thorat 1. mapf.info : webmaster: Sven Koenig Main ... Short presentation of the paper: J. Kottinger, S. Shaull Almagor, and M. Lahijanian, “Explainable This is a poster teaser talk for the paper "A Hierarchical Approach to Presented at the 2021 AI for Urban Mobility Workshop, co-located with AAAI Jonathan Morag, Roni ...
This video shows the fundamental features of This video is a presentation of a MAPF plugin available on GitHub: