Media Summary: Ubuntu 14.04, ROS Indigo, and Kobuki on Raspberry Pi 3 Model B. Command $ roscore & $ roslaunch kobuki_node ... This video shows the potential for using AR to debug an issue with a robot. Here, the robot loses its location estimate and starts ... This video illustrates the Robotic Project we made during our Master in Computer Vision and Robotics. Part 1 : 2D Mapping : The ...
Turtlebot2 Test - Detailed Analysis & Overview
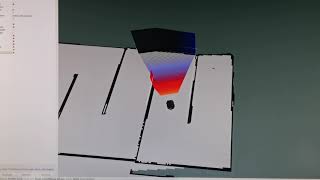
Ubuntu 14.04, ROS Indigo, and Kobuki on Raspberry Pi 3 Model B. Command $ roscore & $ roslaunch kobuki_node ... This video shows the potential for using AR to debug an issue with a robot. Here, the robot loses its location estimate and starts ... This video illustrates the Robotic Project we made during our Master in Computer Vision and Robotics. Part 1 : 2D Mapping : The ... Learn TurtleBot & ROS An open source tutorial series. View & contribute to the project at ROS: Autonomous navigation of Turtlebot2 - Simulation An AR projection of the robot's laser scan, shown in red. The laser scan data is used by the robot to localize itself in the map, plan ...
This is a scenario for sequential balanced task allocation. This video shows the Head-Mounted Device AR display of the robot's motion plan as it navigates autonomously. Also seen in red ... Simulink Master Controlled 3 Turtlebot Follower Experiment. components used: ROS, C++, Launch files, depth camera, robot chassis drivers. ... directly on the turtlebot computer you won't normally do it this way but this just makes it a little bit easier for your first