Media Summary: Q. Qi, et al, BPActuators: Lightweight and Low-Cost In this video, we demonstrate how to create an elastic band integrated textile Researchers at TU Delft have developed highly programmable
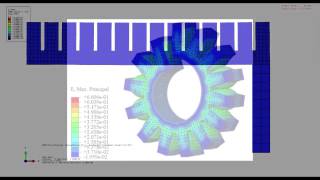
Soft Actuator Modeling - Detailed Analysis & Overview
Q. Qi, et al, BPActuators: Lightweight and Low-Cost In this video, we demonstrate how to create an elastic band integrated textile Researchers at TU Delft have developed highly programmable We built different configurations of these 3D-printed folds-based Submitted to R-AL Special Issue: Interdisciplinarity and Widening Horizons in One Step Closer to Lifelike Robots A self-contained
IEEE/ASME Transactions on Mechatronics Journal Full Manuscript Authors: Cosimo Della Santina, and Daniela Rus Title: Control oriented