Media Summary: Six degrees of freedom (6DOF) were achieved in two completely different ways. The स्वागत है BONGINEERING – इंजीनियरिंग आसानपाठ में! Loss of degree of freedom. Loss and gain of degree of freedom in
Serial And Parallel Manipulator Robot - Detailed Analysis & Overview
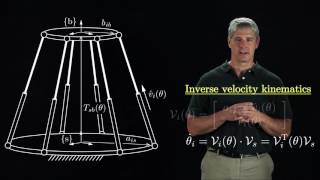
Six degrees of freedom (6DOF) were achieved in two completely different ways. The स्वागत है BONGINEERING – इंजीनियरिंग आसानपाठ में! Loss of degree of freedom. Loss and gain of degree of freedom in This is the video of my talk delivered on 7th July 2021 in the Faculty Development Program on “Application of This is a video supplement to the book "Modern This is a short demo of a miniature 2-axis