Media Summary: TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) Video of our agricultural multipurpose manipulator (developed within the EU-project CROPS) showing its model for Video of the Test n.2 presented in the paper "Multiple
Self Collision Avoidance Using Task Transition Algorithm - Detailed Analysis & Overview
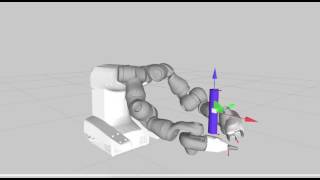
TUM Praktikum - Bau eines modularen Roboters (IN0012,IN2106, IN4231) Video of our agricultural multipurpose manipulator (developed within the EU-project CROPS) showing its model for Video of the Test n.2 presented in the paper "Multiple Richard Cockburn Maclaurin Professor of Aeronautics and Astronautics Read full story here: In this work, we propose a data-driven approach for real-time 12-DoF robot arm, in simulation under Actin control, showing
PRISMA Lab research video experiments - Reactive Collision avoidance using time-varying constraints - nonlinear dynamics of agent IROS 2019 Common formulations to consider We present a distributed control strategy for cars to autonomously achieve a desired formation. The proposed control and the ... This is the implementation of time scaled Fixed targets for both arms (yellow points); active
Real-Time Self-Collision Avoidance in Joint Space for Humanoid Robots This video is a display show for my undergraduate course ''Nonlinear Systems'' final exam project. All robots construct a formation ...