Media Summary: See the other videos in this series: This video ... Lecture 24 of Intro to Robotics @ University of Houston. using ... The algorithm was suggested in the following paper: [1] Islam, F., Nasir, J., Malik, U., Ayaz, Y., & Hasan, O. (2012, August).
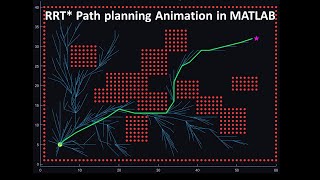
Rrt Finding A Path - Detailed Analysis & Overview
See the other videos in this series: This video ... Lecture 24 of Intro to Robotics @ University of Houston. using ... The algorithm was suggested in the following paper: [1] Islam, F., Nasir, J., Malik, U., Ayaz, Y., & Hasan, O. (2012, August). VDEngineering ~~My Udemy Courses on Motion Planning / Navigation / Trajectory Planning: ... This video visualizes the experimental tests for Car's Automatic Parking System Design. Rapidly-Exploring Random Tree ( This video shows an improvement to the popular
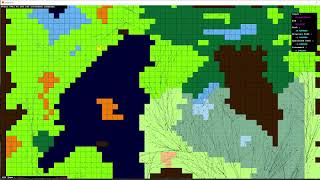
C++/SFML simulation of a robot navigating inside a closed building. It is assumed that the robot knows, a priori, the map of the ...





![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg)