Media Summary: In this video, we show how to use one of the functionalities of RoboDK which is using In this tutorial, you'll learn how to simulate IO mapping using the RoboDK is a powerful offline simulator for industrial
Robot Kuka Con Robotdk Y Python - Detailed Analysis & Overview
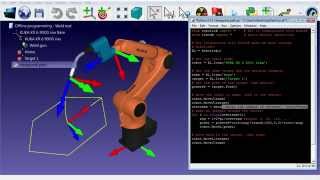
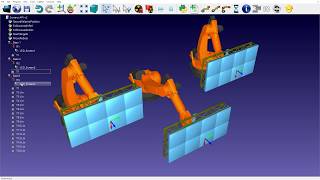
In this video, we show how to use one of the functionalities of RoboDK which is using In this tutorial, you'll learn how to simulate IO mapping using the RoboDK is a powerful offline simulator for industrial in this video, we show the end result of 2 Hi ninjas, in this tutorial, I will show you how I created a pick and place simulation with the 6 DOF This video shows how the RoboDK API can be used to synchronize 3
Basic usage of cartesian move, marker visualization in ROS Kinetic Kame in C++ and Take a look back at Autotool Tech Day: Powered by Steve Hudson, Head of Customer Service UK & Ireland, introduces you to the new The RoboDK API can be used to integrate industrial