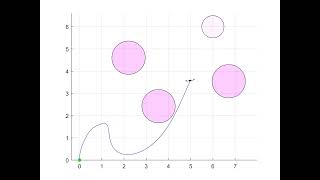
Media Summary: This video illustrates a planar quadrotor (quadrotor confined to the 2D plane) Python Implementation of Reciprocal Velocity Obstacle (RVO) for Multi-agent Systems Guo, M., & Zavlanos, M. M. (2018). This is the implementation of time scaled
Pursuit Ai Dynamic Collision Avoidance - Detailed Analysis & Overview
This video illustrates a planar quadrotor (quadrotor confined to the 2D plane) Python Implementation of Reciprocal Velocity Obstacle (RVO) for Multi-agent Systems Guo, M., & Zavlanos, M. M. (2018). This is the implementation of time scaled This video demonstrates the real-time robot path planning in action for Vehicle driving / obstacle avoidance AI (machine learning) Collision avoidance using time-varying constraints - nonlinear dynamics of agent
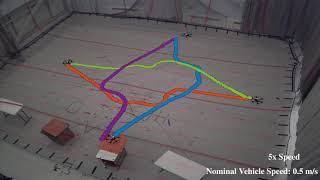
Obstacle location estimation & Collision avoidance path planning using AI based stereo camera Autonomous AI Movement (Wandering + Obstacle Avoidance) This video includes simulation, UAV, and ground vehicle results associated with the paper " Path Following with Collision Avoidance - 2D Road traffic accidents are a leading cause of fatalities worldwide. In the US, human error causes 94% of crashes, resulting in ...