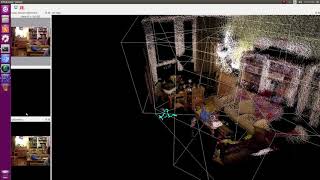
Media Summary: Using TX1 Kinect and ROS roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" Here is a short animation from my short film Project. A tutorial on how I made this from a single Image is available on Patreon: ... Implemented Features: 1) Dialogbox 2) All types of Buttons 3) GroupBoxes 4) MenuBar 5) OPENFILENAME 6) LoadBMP 7) ...
Point Cloud Mapping Demonstration By Tim Lucas - Detailed Analysis & Overview
Using TX1 Kinect and ROS roslaunch rtabmap_ros rgbd_mapping.launch rtabmap_args:="--delete_db_on_start" Here is a short animation from my short film Project. A tutorial on how I made this from a single Image is available on Patreon: ... Implemented Features: 1) Dialogbox 2) All types of Buttons 3) GroupBoxes 4) MenuBar 5) OPENFILENAME 6) LoadBMP 7) ... Experience the Precision of VisionLidar! Witness the seamless journey from raw data to automated classification, cluster detection ... Over the last few years, advances in graph, kernel, and sparse convolutions have helped establish deep networks as the ...











![[CVPR 2026] RHO — Robust Holistic OSM-Based Metric Cross-View Geo-Localization](https://i.ytimg.com/vi/BQkDL9qG7iE/mqdefault.jpg)


