Media Summary: 3d pointcloud construction base on orb-slam Thanks to Jane Street for their support... Check out internships here: More links & stuff We present SegMatch, a technique for enabling autonomous vehicles to recognize previously visited areas based on the ...
Point Cloud Map Creation During Orb Slam Using - Detailed Analysis & Overview
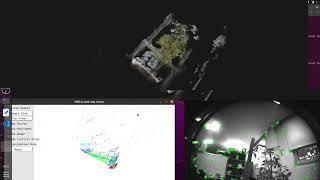
3d pointcloud construction base on orb-slam Thanks to Jane Street for their support... Check out internships here: More links & stuff We present SegMatch, a technique for enabling autonomous vehicles to recognize previously visited areas based on the ... For more information, please visit our website. Check out the RoboSense RS-Ruby, the 128 beams LiDAR Map creation from point cloud and image data