Media Summary: This is my term project in the course of "Advanced AI" and "Robotics Learning". I tried to implement [Breitenstein et al., ICCV, 2009] ... Watch the first video in this series here: This video presents a high-level understanding of the ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ...
Pedestrian Tracking By Detection Using Particle Filter - Detailed Analysis & Overview
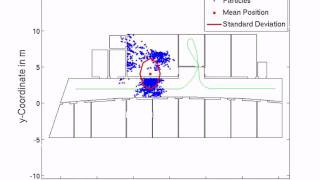
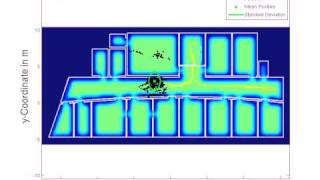
This is my term project in the course of "Advanced AI" and "Robotics Learning". I tried to implement [Breitenstein et al., ICCV, 2009] ... Watch the first video in this series here: This video presents a high-level understanding of the ... This video is part of the Udacity course "Introduction to Computer Vision". Watch the full course at ... Starting from a unknown position represented by the uniformly scattered Artificial Intelligence for Robotics Research Challenge : Particle Filter for Pedestrian Detection that works with Occlusion
The system starts from a known quite well known position on the right side of the map. The system learns the movement patterns ... green box: ground truth (manually labeled) blue box: algorithms estimate yellow dot: low rated Project for Applied estimation - KTH course GitHub: Blue rectangle: Backprojection noisy estimation of the target position Green dot: