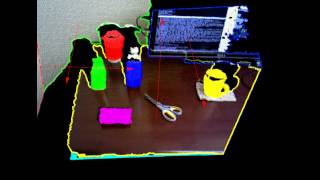
Media Summary: For more information please visit www.willowgarage.com. RealSense Point-cloud Plane segmentation (PCL) Each 3000-gallon (12000 liter) tank, separated from each of its neighbors by 1.5 kilometers, is completely dark inside - except ...
Pcl Surface Detector - Detailed Analysis & Overview
For more information please visit www.willowgarage.com. RealSense Point-cloud Plane segmentation (PCL) Each 3000-gallon (12000 liter) tank, separated from each of its neighbors by 1.5 kilometers, is completely dark inside - except ... Using an Xbox Kinect and ROS in conjuction with the Point Cloud Library( Testing the plane-fitting algorithm at Wean Hall, Carnegie Mellon University. The point cloud is obtained using the disparity map of ... 4 datasets: the lab (0:00), the standard (0:43), chairs (1:58), and the sofa (3:23). Green boxes are segmented person clusters; red ...
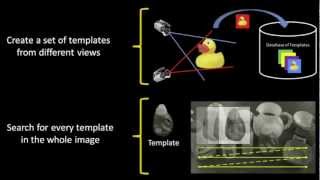
Rosie Li from the University of Washington in St. Louis talks about her contributions to Object detection with PCL global feature pipelines [Point Cloud Processing] Plane Segmentation using Data put through a ground plane extraction using RANSAC in














![[Point Cloud Processing] Plane Segmentation using PCL](https://i.ytimg.com/vi/6FuMTkqUERk/mqdefault.jpg)