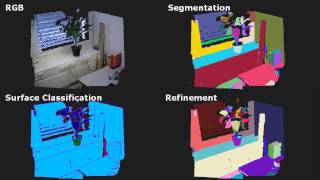
Media Summary: Shows the result of filter applied to point cloud library produced by kinect. Uses nodelets from ROS perception_pcl package. Join us for HPG 2024 in Denver, USA, with SIGGRAPH, July 26-28, 2024. Sign up for conference emails at ... The objective of this project is to lay the foundations for object recognition and subsequent handling of these by the robot Manfred, ...
Pcl Sphere Segmentation - Detailed Analysis & Overview
Shows the result of filter applied to point cloud library produced by kinect. Uses nodelets from ROS perception_pcl package. Join us for HPG 2024 in Denver, USA, with SIGGRAPH, July 26-28, 2024. Sign up for conference emails at ... The objective of this project is to lay the foundations for object recognition and subsequent handling of these by the robot Manfred, ... Second try on the set of parameters for the points projected in table plane with ground truth transformation between frames. The video shows a novel algorithm for range image
Early footage of an Interactive Region Growing









![[Point Cloud Processing] Plane Segmentation using PCL (RoK-3 WalkingReady)](https://i.ytimg.com/vi/aPVCSIewY7g/mqdefault.jpg)
![[Point Cloud Processing] Plane Segmentation using PCL](https://i.ytimg.com/vi/6FuMTkqUERk/mqdefault.jpg)