Media Summary: Facebook Research source code : Istanbul roads source video ... In the Intel Edge AI Scholarship, we programmed a vision system for self- This video is for our GTC 2020 presentation titled "
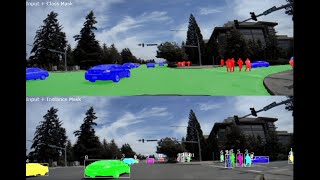
Panoptic Segmentation For Driving Scene - Detailed Analysis & Overview
Facebook Research source code : Istanbul roads source video ... In the Intel Edge AI Scholarship, we programmed a vision system for self- This video is for our GTC 2020 presentation titled " Trailer video for the paper: A. Milioto, J. Behley, C. McCool, and C. Stachniss, “LiDAR Using plus opencv and ffmpeg. Seems like the model likes detecting curbs ... Objective: The objective of this project was to semantically segment the drivable and non-drivable zones in the