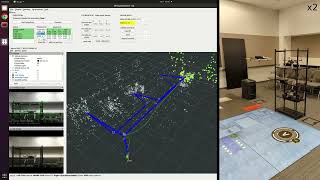
Media Summary: Raúl Mur-Artal and Juan D. Tardós. "ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras". Pythonic implementation of ORB Feature detection based Monocular SLAM. My Socials: Instagram: ... waypoint based navigation for monocular indoor drones. Setup instruction and ROS packages references at: ...
Orbslam Demo - Detailed Analysis & Overview
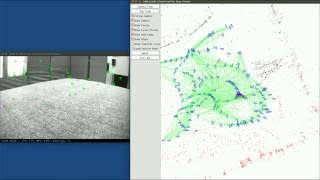
Raúl Mur-Artal and Juan D. Tardós. "ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras". Pythonic implementation of ORB Feature detection based Monocular SLAM. My Socials: Instagram: ... waypoint based navigation for monocular indoor drones. Setup instruction and ROS packages references at: ... Raúl Mur-Artal and Juan D. Tardós. "Visual-Inertial Monocular SLAM with Map Reuse". ArXiv preprint arXiv 1610.05949, 2016. For more information, please visit our website. We build a map with sequence V1_02_medium. We then disable mapping (Localization mode) and use the map to localize the ...
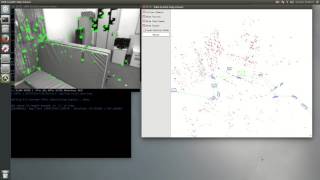
E-mail : rodrigosarmentoxx.com GitHub: This project Paper ... Here's the code I'm using: Hoping to use this for navigating a long, monotonous hallway ... ORB-SLAM3 runs on a remote laptop. The free space of the occupancy map is drawn using the Bresenham's line algorithm, ...