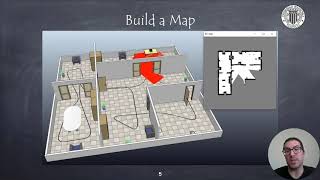
Media Summary: This video is part of the RoboJackets Software Training Program for Fall 2021. This video explains how to use the CoppeliaSim plugin to create See the other videos in this series: This video ...
Occupancy Grids Path Planning - Detailed Analysis & Overview
This video is part of the RoboJackets Software Training Program for Fall 2021. This video explains how to use the CoppeliaSim plugin to create See the other videos in this series: This video ... Ever wondered how robots 'see' and understand their surroundings to move independently? This video demystifies Ever wondered how autonomous robots perceive and map their surroundings to navigate safely? This video delves into the core ... ENLACE interns Yoatzin and Ziyun implemented mapping on
Watershed Graphs for Faster Pathfinding in Binary Paper: Abstract: Actively exploring and mapping an unknown environment ... A Pioneer ground vehicle autonomously explores a Styrofoam environment while generating an exact Final Project for Intro to Programming GPU Fall 2025. Ubuntu Version : 22.04 ROS2 Version : HUMBLE This Moving obstacle information is not being updated in the











![[IROS19] Online and Consistent Occupancy Grid Mapping for Planning in Unknown Environments](https://i.ytimg.com/vi/d_UD2cMFjc4/mqdefault.jpg)




