Media Summary: The objective of this project is to explore the functionalities of Alan HUI BON HOA, Vice President of United Robotics Group, shows us the evolution of Here we see the DIARC architecture controlling a
Nao Human Interaction And Object Picking - Detailed Analysis & Overview
The objective of this project is to explore the functionalities of Alan HUI BON HOA, Vice President of United Robotics Group, shows us the evolution of Here we see the DIARC architecture controlling a TDM is a behavior control architecture that allows to program very rapidly new behaviors through the simple association and/or ... NAO: Human Interaction And Object Picking Pick up an object with Nao and Android - PLG Group - Uc3m
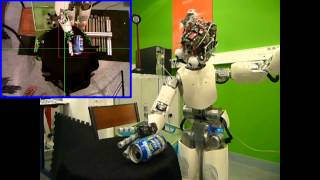
This video shows an experiment that was done for my Master Thesis at KTH (Sweden) in 2014. The subject is "Collaborative ... NAO locate an object and grasp from top - PLG Group - Uc3m Professor Pim Haselager was watching a football game and didn't want to leave the room for a beer. He said to himself: If I had a ... This video shows some features of the MACSi cognitive architecture: it is designed to support experiments to make a humanoid ... Experiment made as a graduation thesis of student Beatriz Couto at UNESP Bauru. Full project can be found at: ...