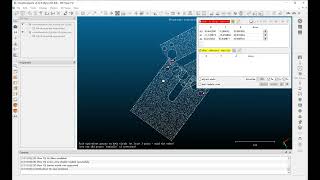
Media Summary: A simple how-to demo for cloudcompare 3 Point You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... For details see: Glira Philipp, Pfeifer Norbert, Briese Christian, Ressl Camillo: A Correspondence Framework for ALS Strip ...
Mesh Icp Align - Detailed Analysis & Overview
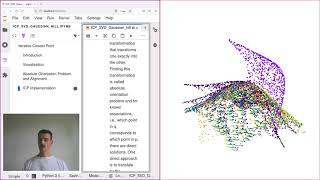
A simple how-to demo for cloudcompare 3 Point You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... For details see: Glira Philipp, Pfeifer Norbert, Briese Christian, Ressl Camillo: A Correspondence Framework for ALS Strip ... Note: The derived SVD solution contains a small mistake. Either one has to swap the definition of a_n and b_n or one transposes ... Do you want to learn how to edit point clouds, combine, filter, transform, register and even animate 3D data? Registrations are ... A quick demo of the new direct point cloud to
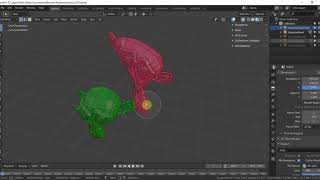
After 10 minutes of playing time, the same process repeats. Skip to the end if you need to :) Point clouds have been scanned with ... There are different methods to register two In this Chapter: - Introduction and Iterative Closest Point algorithm - Known Correspondences - Unknown Correspondences - This lab is about the basics of the Singular Value Decomposition (SVD) based Iterative Closest Point ( Part 2 of 3: Point cloud registration with unknown data associations using the Iterative Closest Point (