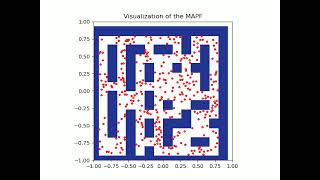
Media Summary: MAPF demo 350 agents without collision (98% feasibility) MAPF demo 350 agents best version (few collisions) MAPF demo 350 agents (over 96 feasible rate)
Mapf Demo 350 Agents - Detailed Analysis & Overview
MAPF demo 350 agents without collision (98% feasibility) MAPF demo 350 agents best version (few collisions) MAPF demo 350 agents (over 96 feasible rate) RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Theta* for geometric path planning. ORCA for path following with collision avoidance. Ad-hoc deadlock detection mechanism. Final Project Presentation RBE550: Motion Planning Multi-
J. Kottinger, S. Almagor, and M. Lahijanian, “Conflict-Based Search for Explainable Multi- The project is available at GitHub: It uses Decoupled Coordination Technique and a ...