Media Summary: This 3-minutes video is for RSS Pioneer 2020 workshop ( that summarises ... Paper link: This paper addresses the problem of active collaborative ICRA 2018 Spotlight Video Interactive Session Thu PM Pod J.4 Authors: Angeletti, Gabriele; Caputo, Barbara; Tommasi, Tatiana ...
Learning Methods For Robust Localization - Detailed Analysis & Overview
This 3-minutes video is for RSS Pioneer 2020 workshop ( that summarises ... Paper link: This paper addresses the problem of active collaborative ICRA 2018 Spotlight Video Interactive Session Thu PM Pod J.4 Authors: Angeletti, Gabriele; Caputo, Barbara; Tommasi, Tatiana ... Published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. Part of the IROS2022 Best ... To be published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022 This video belongs to our paper submitted to IEEE 22nd International Conference on Information Fusion 2019 in Ottawa, Canada: ...
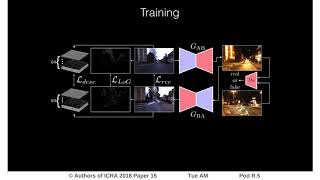
In many computer vision tasks, we have to explore a large set of possible patterns to find at least one that conforms to a model. In this video we provide an overview of our recent paper: Under the Radar: This video presents our ICCV 2025 paper: PRVQL: Progressive Knowledge-guided Refinement for Paper: X. Zhang, Y. Zhang, P. Liu, and S. Zhao*, " ICRA 2018 Spotlight Video Interactive Session Thu PM Pod F.8 Authors: Valada, Abhinav; Radwan, Noha; Burgard, Wolfram Title: ... ICRA 2018 Spotlight Video Interactive Session Tue AM Pod R.5 Authors: Porav, Horia; Maddern, Will; Newman, Paul Title: ...
Computer vision - final project Jade Nowlin, Karrar Khudhair, Redouane Laaroussi High level explanation of In this episode of the AI Research Roundup, host Alex delves into a groundbreaking paper on









![[IEEE-RAL-2022] Robust Localization of Occluded Targets in Aerial Manipulation](https://i.ytimg.com/vi/t6-0zaRuFIY/mqdefault.jpg)
![[RA-L] A Modular Residual Learning Framework to Enhance Model-Based Approach for Robust Locomotion](https://i.ytimg.com/vi/zYmf5ERsJfc/mqdefault.jpg)