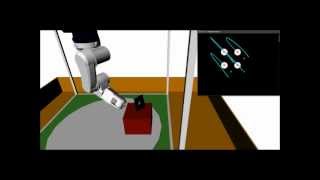
Media Summary: Bringing robotics and vision together! This video demonstrates an innovative control technique where a camera, mounted on a ... This video is the internal view of the camera used to Interception of low-altitude intruding targets with low-cost drones equipped strapdown camera presents a competitive option.
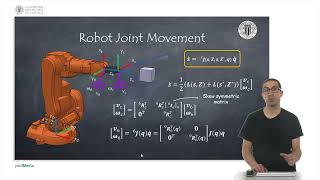
Image Based Visual Servoing Simulation - Detailed Analysis & Overview
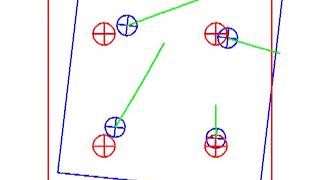
Bringing robotics and vision together! This video demonstrates an innovative control technique where a camera, mounted on a ... This video is the internal view of the camera used to Interception of low-altitude intruding targets with low-cost drones equipped strapdown camera presents a competitive option. This video explains how to implement robot Nonlinear model predictive control (NMPC) is employed to regulate the position and yaw of the quadrotor relative to a ground ... This video shows the trajectory of 4 points in the
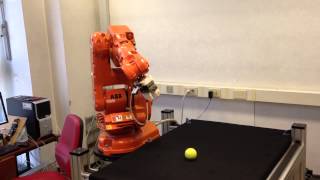
Preliminary test PBVS contro of an ABB IRB140 using OpenCV. Switching Reference Image-Based Visual Servoing for Underwater Docking Simulation Implementation of IBVS proposed by Weiss and Sanderson under