Media Summary: [IEEE/CVF 2021] Local to Global: Efficient Visual Localization for a Monocular Camera RoboSense(深圳市速腾聚创科技有限公司 www.robosense.ai) partners with AMAP to provide DT-Loc: Monocular Visual Localization on HD Vector Map Using Distance Transforms
Hd Map Based Visual Localization - Detailed Analysis & Overview
[IEEE/CVF 2021] Local to Global: Efficient Visual Localization for a Monocular Camera RoboSense(深圳市速腾聚创科技有限公司 www.robosense.ai) partners with AMAP to provide DT-Loc: Monocular Visual Localization on HD Vector Map Using Distance Transforms Organizers: Torsten Sattler; Akihiko Torii; Alex Kendall; Giorgos Tolias Description: Place recognition and image- NAVENTIK PATHFINDER technology for GNSS vehicle positioning on Accepted to ICRA2022. We revisit the problem of efficiently leveraging prior
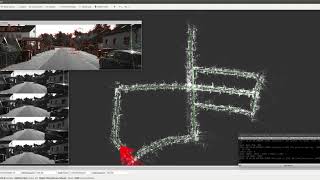
HD Map - Map Learning - from NavInfo 2018 An unedited, continuous drive showing Civil Webpage: Date: October 11, 2021 Time: 9:00 AM - 2:30 PM EDT / 3:00 PM - 8:30 PM ... LiveMapping provides an integrated solution for fast and efficient construction of high-precision and high-freshness Note: The poses of the vehicle are estimated from a vision-only non-linear least-squares optimization problem, that is, there is no ... Video for our IROS 2019 paper on self-driving vehicle


![[IEEE/CVF 2021] Local to Global: Efficient Visual Localization for a Monocular Camera](https://i.ytimg.com/vi/jcfI41m4C5Q/mqdefault.jpg)








![[ICCV 2021] Workshop on Map-Based Localization for Autonomous Driving](https://i.ytimg.com/vi/p00-KOInGmc/mqdefault.jpg)




