Media Summary: ICRA 2018 Spotlight Video Interactive Session Thu PM Pod E.2 Authors: Schmidt, Philipp; Vahrenkamp, Nikolaus; Waechter, ... The 2020 CORSMAL Challenge - Multi-modal fusion and learning for robotics As part of the IEEE International Conference on ... Video corresponding to paper ( accepted in the Robotics and Automation Letters ...
Grasping Unknown Objects Using Convolutional Neural Networks - Detailed Analysis & Overview
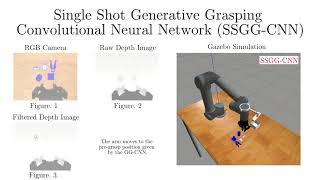
ICRA 2018 Spotlight Video Interactive Session Thu PM Pod E.2 Authors: Schmidt, Philipp; Vahrenkamp, Nikolaus; Waechter, ... The 2020 CORSMAL Challenge - Multi-modal fusion and learning for robotics As part of the IEEE International Conference on ... Video corresponding to paper ( accepted in the Robotics and Automation Letters ... We present a modular robotic system to tackle the problem of generating and performing antipodal robotic Code is provided at: This paper proposes a two-step cascaded system Object grasping using deep learning and point cloud
The video shows an application of a vision-guided robotic