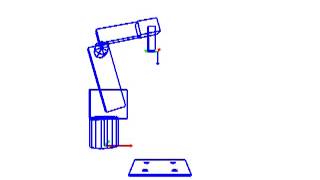
Media Summary: This video corresponds to the trajectory of the Franka Robotics Panda robot during an This video shows the trajectory of the camera from an The video was taken from the right camera. The system is to track a point image feature and to move the robot in x-y axes w.r.t ...
Eye To Hand Ibvs External View - Detailed Analysis & Overview
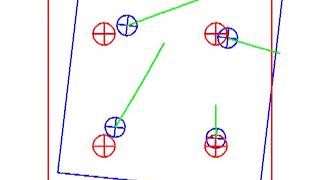
This video corresponds to the trajectory of the Franka Robotics Panda robot during an This video shows the trajectory of the camera from an The video was taken from the right camera. The system is to track a point image feature and to move the robot in x-y axes w.r.t ... The video was taken from the camera used in the system. The system tracks 4 image feature points and to move the manipulator ... The video was taken from the left camera. The system is to track a point image feature and to move the robot in x-y axes w.r.t ... This video shows the trajectory of 4 points in the image during an image-based visual servoing (
Eye-in-Hand Mono Image-based Visual Servoing - Feature Points The controller gain was small in order to verify the end-effector movement, the joints movement and for safety reason since the ... Eye-in-Hand Stereo Image-based Visual Servoing