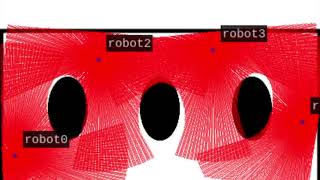
Media Summary: We show the performance of a path planning algorithm for a team of robots executing a Persistent coverage control with performance guarantee, etc... Simulation: Safe Persistent Coverage Control with CBF Based on Sparse Bayesian Learning
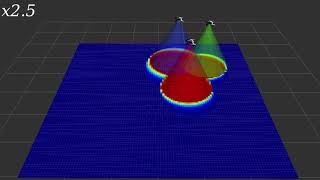
Equitable Persistent Coverage - Detailed Analysis & Overview
We show the performance of a path planning algorithm for a team of robots executing a Persistent coverage control with performance guarantee, etc... Simulation: Safe Persistent Coverage Control with CBF Based on Sparse Bayesian Learning Drone team keep moving by combination of No Hole Visual Collision and obstacle avoidance, and persistification are achieved by CBF while Supplementary video for our RAL+ICRA 2020 video. Link to additional visualization:
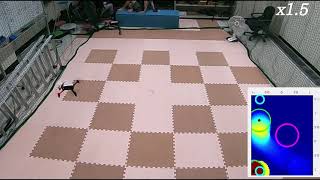
Persistent Coverage Control by Drone Team (with Energy Management) England's tax-funded NHS achieves universal Join us for an insightful discussion on the Q3 FY26 Earnings of Authors: Omur Arslan and Hancheng Min and Daniel E. Koditschek Abstract: A challenge of pan/tilt/zoom (PTZ) camera networks ...