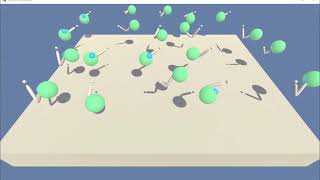
Media Summary: Introduce the Udacity Deep Reinforcement Learning Project 2: In this project, we work with Reacher ... In this project an agent is a two link arm wich end effector will be track an spherical volume in the space.
Drlnd Continuous Control - Detailed Analysis & Overview
Introduce the Udacity Deep Reinforcement Learning Project 2: In this project, we work with Reacher ... In this project an agent is a two link arm wich end effector will be track an spherical volume in the space. This is the second project of the Deep Reinforcement Learning Nanodegree. I trained a DDPG Agent to solve the Reacher ... ... up and I'm going to talk today about data data decisions deep reinforcement learning for The second project of the Deep Reinforcement Learning Nanodegree Program. In this project, a double-jointed arm can move to ...
This is the result of training a double joint robot arm to reach its target location using DDPG( Agent in "reacher" environment trained to reach the ball using deep reinforcement learning (deep deterministic policy gradient ...