Media Summary: Part of the ECE 542 Virtual Symposium (Spring 2020) In recent years, there has been a rapid increase in research on ... Use transfer learning to train DeepLabV3 to segment the Udacity's Self-Driving Car Nanodegree, Term 3, Project 2 GitHub: ...
Drivable Image Segmentation - Detailed Analysis & Overview
Part of the ECE 542 Virtual Symposium (Spring 2020) In recent years, there has been a rapid increase in research on ... Use transfer learning to train DeepLabV3 to segment the Udacity's Self-Driving Car Nanodegree, Term 3, Project 2 GitHub: ... Using a simple example I will explain the difference between image classification, object detection and Embark on a visual journey through the intricate world of In this video, we'll explore how to perform automatic
First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... HOS 1.0: The foundational rule-based self-driving car algorithm we developed and used in 2023. This algorithm marked the ... Udacity's Self-Driving Car Nanodegree, Term 3, Project 2. Semantic TwinLiteNet: An Lightweight Model for Driveable Area and Lane Line Segmentation inSelf-Driving Cars Objective: The objective of this project was to semantically segment the Deep learning added a huge boost to the already rapidly developing field of computer vision. With deep learning, a lot of new ...
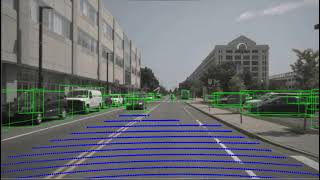
Deep Neural Network for determining driving space This is a extension of the Semantic